




GeoSLAM手持移動掃描儀快速矢量化成圖方案
1.全站儀與三維激光掃描技術優勢對比分析
全站儀的主要工作原理是通過兩個或多個已知點的坐標,在儀器內部輸入預先設定的三維坐標系,然后通過不同的測站,測得不同的點在該坐標系內的坐標,然后存儲在儀器內,最終導入到CAD中獲得一個統一坐標系下的點的分布情況圖,然后根據需要加工成我們所需要的矢量圖像。
三維激光掃描儀主要指是對物體進行 “形、 色、 面” 的三維立體的掃描測量。它可以直接將各種大型的、復雜的實體三維數據完整的采集到計算機中,從而快速的重新構建出建筑物精準的三維空間點云模型,再經專業后處理軟件完成三維矢量模型。
全站儀和三維激光掃描儀在測量時都是通過光的傳播速度與時間的乘積得到距離,其精度誤差均可以達到毫米及厘米級別。
雖然全站儀和三維激光掃描儀都可以實現對不規則物體的精確測量,但是由于全站儀采用的是通過測量坐標點連接成線的方式進行測量,對弧形及復雜空間等不規則物體,測量時需要通過多次測量大量的點才能完成,精確性和效率將大打折扣。但是三維激光掃描儀是通過掃描面來實現對物體的測量,所以對弧形及復雜空間等不規則建筑有著更高的效率,可以一次掃描完成。
全站儀在工作時存在著諸如人工成本高、空間復雜不通視、測量累計誤差較大、成果形式單一等難點。但是三維激光掃描儀僅需一人就能完成整個掃描工作,并且不需要大量支點換站,使整個測量過程是一個連續且輕松的過程。
2.如何選擇適合類型的三維激光掃描儀
2.1三維激光掃描儀的類型劃分
沒有任何一款三維激光掃描儀能夠滿足所有領域的應用。比如小范圍的室內外高精度數據采集,中等測距的掃描儀比較適合;區域固定的大面積遠距離數據采集,長測距掃描儀較為合適;區域不固定且面積較大的數據采集移動(車載/機載)式掃描儀為主導;封閉且復雜室內空間數據采集,背包式移動掃描儀必當首選。因此實際生產應用中要根據不同項目目的來選擇合適類型的掃描儀。
相位式掃描儀是發射出一束不間斷的整數波長的激光,通過計算從物體反射回來的激光波的相位差來計算和記錄目標物體的距離(如faro、z+F等產品)。相位式掃描儀由于采用的是連續光源,功率一般較低,所以測量范圍也較小,測量精度主要受相位比較器的精度和調制信號的頻率限制,增大調制信號的頻率可以提高精度,但測量范圍也隨之變小,所以為了在不影響測量范圍的前提下提高測量精度,一般都設置多個調頻頻率,掃描范圍通常限制在100-300m內與時間漂移原理相比,精度更優越可以達到mm級。
也稱之為脈沖測距式激光掃描儀,其測量精度受到掃描儀系統準確的量測時間的限制。當用該方式測量近距離物體的時候,由于時間太短,就會產生很大誤差。所以該方法比較適合測量遠距離物體,如地形掃描,不適合于近景掃描。大多數長距離掃描儀(激光測距>500m)測距都是采用這種原理,這種原理測距范圍可以達到幾百米。甚至掃描范圍達到千米也是可能的(如Iiste、optech、riegl等產品)。但是在大范圍內的掃描測距,精度相對較低,一般精度為cm級。
它是將脈沖式測距和相位式測距兩種方法結合起來,產生了一種新的測距方法:脈沖-相位式測距法(如天寶TX8、萊卡P系列等產品)。這種方法利用脈沖式測距實現對距離的粗測,利用相位式測距實現對距離的精測。
SLAM是Simultaneous localization and mapping縮寫,意為“同步定位與建圖”。SLAM問題可以描述為: 掃描儀在未知環境中從一個未知位置開始移動,在移動過程中根據位置估計和地圖進行自身定位,同時在自身定位的基礎上建造增量式地圖,實現掃描儀的自主定位和導航。
SLAM技術是激光掃描儀的運動軌跡是一條與工作人員行走的步態有關的非線性和高動態的曲線。按照一般的理解,激光掃描儀如果安裝在移動測量系統中,一定要有一個高精度的定位系統(POS系統)與之匹配,這樣,激光掃描儀得到的激光點才能得到對應的位置和姿態數據,進而合成三維的激光點云。為了能解算出激光點云數據的高動態非線性位姿,通過研究激光點云的處理算法,可從這些雜亂無章的點云中找到線索,求取其中隱含的更穩定的高階特征點和特征向量,并連續跟蹤這些特征點和特征向量,進而高精度地動態反向解算掃描儀的位置和姿態。這種高精度的動態反向解算位置和姿態的方法顛覆了傳統的測繪方法,為測繪技術開拓了一種新的思路。
2.2 SLAM掃描儀復雜空間快速三維移動掃描
移動掃描的優勢在掃描領域是眾所周知的。與傳統的機架式掃描儀(TLS)相比,移動掃描設備可以更好的涵蓋掃描范圍以及加速工作流程,這也意味著可以減少服務供應商在現場的工作時間,并減低掃描成本。
目前,常見的移動測量系統通常是基于車載或無人機載等運動載體的測量系統,需要絕對依賴于全球衛星導航系統(GNSS)和慣性導航系統,只能適用于室外露天環境掃描,無法滿足在封閉無GPS衛星信號的環境中連續作業。機架式三維激光掃描儀不需要GPS輔助定位,可用于室內及室外環境掃描,但復雜空間需要大量換站,然后進行測站點云拼接,采集效率十分低下。但是,SLAM掃描儀技術在封閉空間進行移動掃描具有較好的應用,完全不依托GPS信號輔助定位,能夠對室內及室外環境進行連續移動掃描。因此,SLAM技術在測繪領域中的應用降低了測量復雜性,不需要大量標記地物點,適用于在室內室外場景,對于解決現階段復雜封閉空間的定位及場景重建測繪具有廣闊前景。
由于SLAM技術無需GPS信號,對工作環境又有極強的適應性,基于SLAM技術的移動測量系統在多個測繪領域發揮作用,具體表現為:
需要注意的是,每個制造商在其移動掃描系統中都有自己專有的SLAM算法。每一個算法在表面上看起來都非常相似,但它們之間的差異可能意味著最終數據的質量會有巨大的差異。
這也是為什么,為確保高質量的掃描結果,需要深入了解背后的SLAM算法的具體細節。了解其SLAM算法支持哪些方法來更正誤差。目前,國內外已有很多基于SLAM原理研發的移動掃描產品,這其中最受歡迎的要屬英國GeoSLAM公司所研發生產的GeoSLAM系列掃描儀,截止目前國內有超上百家企業和高校已購買該產品用于生產及科研研究。
GeoSLAM Horizon 手持式移動三維激光掃描儀是由澳大利亞國家科學研究機構CSRO和英國三維激光雷達采礦行業解決方案提供者3D lasermapping公司以合資企業的形式成立,并聯合研發出的目前最輕便的SLAM掃描系統。

GeoSLAM 掃描儀

GeoSLAM Horizon 掃描儀技術參數
3.GeoSLAM掃描儀快速矢量化成圖技術方案
3.1整體測繪實施流程
基于SLAM技術可以對視覺信息和激光雷達數據進行三維重建與地圖構建。它在測繪領域有著廣泛的應用,尤其是能夠更加精確地重建三維模型數據,這對于精確測量,高精度導航,特別是室內測繪中等方面的應用有著重要的意義。

GeoSLAM移動掃描測繪整體實施流程
3.2 測區劃分及線路規劃
眾所周知SLAM系統沒有GPS信號輔助定位,IMU長時間工作累計誤差較大,最終將導致數據成果精度不達標。因此,在使用SLAM設備掃描時需合理控制掃描時間,通常單次掃描時間不宜超過30分鐘為最優方案。以單次掃描時間控制在30分鐘內為前提,需對大區域掃描場景進行測區劃分,拆分為多個合理的區塊,各區塊之間保證不小于20%-30%的重疊部分,且對各區塊提前進行掃描線路規劃。掃描線路規劃的合理性對于提高掃描成果精度至關重要。
測區劃分:
以單次掃描時間控制在30分鐘內為前提,需對大區域掃描場景進行測區劃分,拆分為多個合理的區塊,各區塊之間保證不小于20%-30%的重疊部分,且對各區塊提前進行掃描線路規劃。在日常測繪領域應用中,測區劃分主要面臨兩種極端環境:大區域的中央掃描;線性掃描;其余所有環境掃描遵循基本測區劃分原則做適當調整即可滿足測量需求。比如單個建筑物需對建筑外圍主體,室內以及地下空間進行整體掃描時,保證各劃分區塊間具有合理重疊部分,后端軟件將通過各區塊重疊部分的點云進行拼接融合。

大區域的中央掃描劃分原則

線性掃描劃分原則
線路規劃:
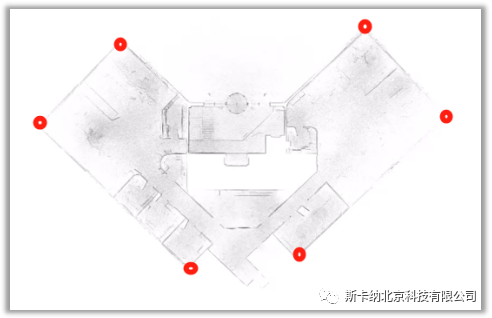
最為理想的掃描線路為“閉環掃描”。執行“閉環掃描”,只需要簡單的回到一個之前掃描過的點,然后SLAM 將會識別這個重疊點。此步驟提供了其所需的信息來計算已發生的任何偏移誤差或跟蹤誤差并進行糾正。GeoSLAM產品后端軟件算法中對“閉環掃描”優化極為明顯。
“閉環掃描”是非常重要的對于提高SLAM成果精度。在物體周圍找到的閉合環越多,精確度就越高。另外,有助于確保在閉合環區域內采集的數據沒有漏洞。
找到開始掃描的最佳地點。理想情況下,從初始起點位置的一個方向開始移動,然后從另一個方向閉合回起點位置(起始點即終點位置)。

“有始有終”的單一閉環掃描線路
“將匹配好的SLAM 數據通過多幀匹配和閉環檢測,反過來精算軌跡。將精算后的軌跡數據進行整體連續匹配。最終解算精密點云數據”。多次線路閉環是提高SLAM解算精度最為有效的方法。對于GeoSLAM產品, 保證O型循環的閉合工作是最好的,越多的O型循環閉合能給出最準確的數據。

U型循環閉合與O型循環閉合的線路規劃
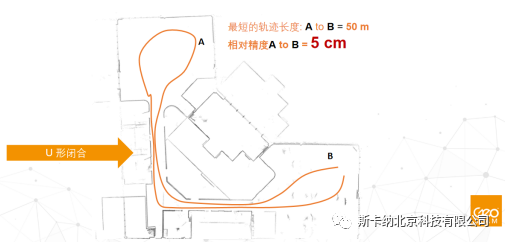
相同的掃描環境U型循環閉合A到B的相對精度為5cm
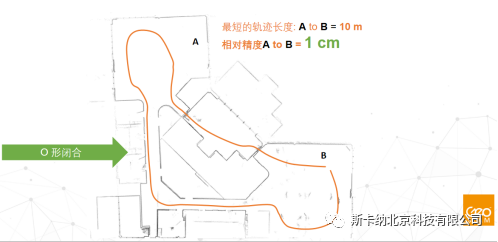
相同的掃描環境O型循環閉合A到B的相對精度為1cm
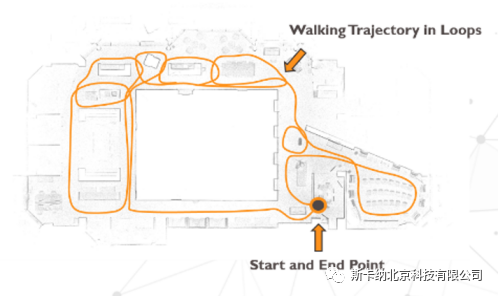
“有始有終”的多個閉環最佳掃描線路
“閉環掃描”是非常重要的對于提高SLAM成果精度。如果要采集一個多層的室內建筑,垂直O型循環閉合采集是首要考慮的。這意味著,如果采集的建筑有兩樓梯或多個出入口,一定要同時使用它們。

垂直循環閉合掃描線路規劃
3.3 投入設備及軟件
|
序號 |
儀器設備名稱 |
規格型號 |
單位 |
數量 |
備注 |
|
1 |
全站儀 |
國產或進口均可 |
套 |
1 |
用于控制測量 |
|
2 |
GPS |
國產或進口均可 |
套 |
1 |
用于控制測量 |
|
3 |
移動掃描儀 |
GeoSLAM Horizon |
套 |
1 |
采集三維點云數據 |
|
4 |
移動工作站 |
戴爾或惠普等 |
臺 |
3 |
用于三維點云數據解算及矢量成圖繪制 |
|
5 |
點云解算軟件 |
GeoSLAM HUB |
套 |
1 |
用于三維掃描數據預處理 |
|
6 |
點云后處理軟件 |
Realworks |
套 |
1 |
用于三維點云數據的拼接及簡化 |
|
7 |
點云后處理軟件 |
GeoSLAM Draw |
套 |
1 |
三維點云數據平立剖面快速生成 |
|
8 |
矢量成圖編輯 |
Autodesk CAD |
套 |
3 |
用于矢量成圖編輯 |
3.4 GeoSLAM掃描儀控制測量
控制測量是工程建設中各項測量工作的基礎。控制測量的目的是精確測定控制點的三維位置。建筑室內外整體測繪控制測量是建筑整體三維掃描的基準和框架,而且在做控制測量的同時還要和三維激光掃描控制點進行聯測,保證三維激光掃描數據控制測量坐標系保持一致,同時是后期各種測繪工程的開展的依據,包括地形圖的測繪。
提前探勘測區,在合理劃分區塊之后,對各區塊進行合理控制點布設,布設原則需遵循控制點測量布設原則,均勻分布于區塊范圍邊緣。一般來說,滿足GeoSLAM產品掃描的控制點布設密度的原則為:周圍環境結構特征較少的區域應為40m-50m布設一個控制點;在周圍環境特征點豐富的環境中應為100 m布設一個控制點。控制點坐標可通過GPS實測或通過全站儀測量獲得。針對大型商場室內或地下空間掃描,為保證三維點云數據坐標轉換精度滿足限差要求,需通過全站儀支導線引測控制點到室內環境,且控制點分布原則不變。
由于GeoSLAM系列設備采集的點云數據是處于其獨立的相對坐標系統,為了實現坐標轉換,使點云數據擁有絕對坐標,傳統三維掃描儀方法是在測區范圍內布設標靶紙或標靶球。通過人工提取標靶紙中心坐標或擬合球體中心坐標實現坐標轉換。該過程不但加大了外業工作量,還需要借助第三方軟件進行處理,操作過于繁瑣,且坐標轉換的精度會受到人為干預和球體擬合偏差影響。
為了提高外業工作效率,簡化內業數據處理流程,減少項目成本和時間。GeoSLAM公司現推出GeoSLAM基準標定板,結合GeoSLAM HUB軟件。旨在實現快速、便捷、高精度的點云數據坐標轉換處理。只需野外作業時,使基準標定板“十字”中心停留于控制點上方10秒,掃描儀將自動記錄該參考點,數據導入GeoSLAM HUB中自動識別控制點對應的參考點,就能對點云數據進行精準坐標轉換,并給出坐標轉換后的精度報告。
3.5 GeoSLAM掃描儀數據采集
儀器操作:

作業過程注意事項:
3.6 GeoSLAM掃描儀數據處理
將GeoSLAM掃描儀采集的原始數據導入GeoSLAM HUB軟件進行解算,數據解算時間與電腦配置相關,通常單臺工作站對單個區塊掃描數據解算時間約為外業掃描時間的1.5-2倍不等。
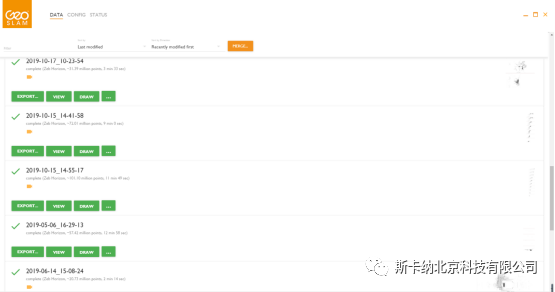
GeoSLAM HUB軟件數據解算
第一遍點云數據解算完成后,導入該區塊數據對應的控制點坐標,進行第二遍數據解算,即點云坐標轉換并自動生成坐標轉換精度報告。

GeoSLAM HUB坐標轉換精度報告
數據解算完成后可在GeoSLAM HUB軟件中以不同模式查看點云數據的整體3D效果。當同步影像與點云相匹配之后,點云數據還能夠以RGB真彩色顯示。

GeoSLAM HUB 軟件中查看點云
如果掃描項目不要求點云轉換到絕對坐標,按區域劃分原則所劃分的各掃描區塊點云可直接使用GeoSLAM HUB軟件完成點云拼接。

GeoSLAM HUB 軟件點云拼接
如果掃描項目要求點云轉換到絕對坐標,按區域劃分原則所劃分的各掃描區塊點云中一部分帶有控制點一部分不含控制點,完成點云拼接且保證整體數據均轉換到絕對坐標需借助第三方軟件。使用Realworks軟件可同時導入GeoSLAM HUB軟件解算的帶有絕對坐標與相對坐標的點云數據,并對點云進行拼接,融合,裁剪,簡化及導出等操作。

Realworks軟件對各區塊點云拼接
經Realworks軟件處理導出的點云,可直接導入GeoSLAM DRAW軟件中進行快速平立剖面的生成及自動矢量圖的繪制,且矢量成果可直接導出Dwg的格式進入CAD進行二測編輯。

GeoSLAM DRAW軟件快速平立剖面圖生成
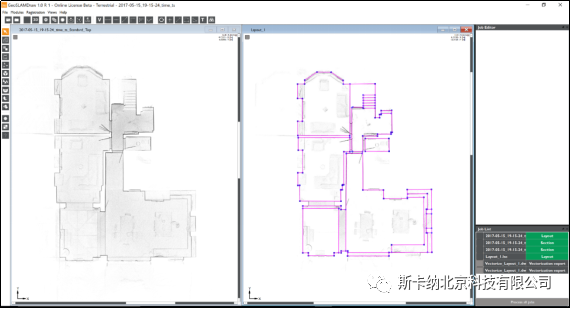
GeoSLAM DRAW軟件自動矢量圖繪制

Dwg成果進入CAD二次編輯成圖
4. GeoSLAM HORIZON掃描產品彩頁
配置清單
|
序號 |
名稱 |
型號 |
單位 |
數量 |
|
1 |
手持三維激光掃描儀 |
ZEB-HORIZON |
臺 |
1 |
|
2 |
數據處理器 |
ZEB-HORIZON data logger |
個 |
1 |
|
3 |
電池 |
PAG L90 SLIM |
塊 |
1 |
|
4 |
數據線纜 |
ZEB-HORIZON main cable |
根 |
1 |
|
5 |
USB數據線纜 |
USB cable |
根 |
1 |
|
6 |
電源+插頭 |
Battery charger and power supply unit |
套 |
1 |
|
7 |
車載充電線 |
Car charger |
根 |
1 |
|
8 |
數據處理軟件 |
GeoSLAM Hub軟件 |
套 |
1 |
|
9 |
16G U盤(U盤里包含許可碼及軟件安裝包) |
Kingston |
個 |
1 |
|
10 |
背包 |
Backpack |
個 |
1 |





新聞資訊

熱點新聞排行榜
- 2019-10-23
- 2020-06-16
- 2020-04-01
- 2019-12-31
- 2024-11-12
- 2020-03-03
新聞資訊
News information


北京市豐臺區馬家堡東路121號院2號樓227室
趙經理:13126670265
西安市雁塔區高新路6號高新銀座A-1702室
陳經理:13621353771
武漢市東湖高新區光谷大道現代森林小鎮A-616室 杜經理:15652385204
成都市成華區昭覺寺南路119號融景城寫字樓4棟1單元706室 寧經理:13308042302
石家莊市橋西區中山西路700號悅享天地A
925室 楊經理:15630167832
哈爾濱市道外區南通大街118號潤達大廈B座701室 史經理:18686858661